文章目录
1.配置Softerware & Updates
2.添加软件源
3.设置key
4.更新并安装
4.1 更新
4.2 安装(ros-noetic-desktop-full)
4.2.1 安装aptitude
4.2.2 安装ROS软件包
5.添加环境变量
6.安装构建依赖
7.初始化和更新
7.1 初始化
7.1.1 目前可行的解决办法:重新定位资源
7.1.2 结果
7.2 更新
1.配置Softerware & Updates
如图所示配置即可

2.添加软件源
如果不添加软件源,是无法定位软件包的
清华源
3.设置key
如果不设置key,在sudo apt update的时候会有如下问题

4.更新并安装
4.1 更新
4.2 安装(ros-noetic-desktop-full)
如果使用apt安装,几乎百分百会出现如下问题

因此我们使用aptitude安装
4.2.1 安装aptitude
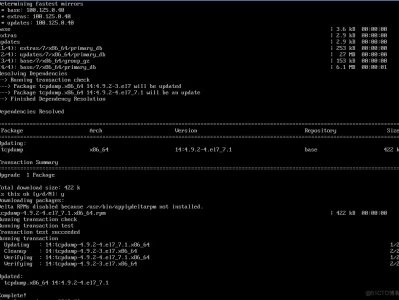
4.2.2 安装ROS软件包
接下来会列出一栏未安装的,如下图

切记,此时一定要选no
然后,aptitude会给出第二个解决方案,仍然有很多未安装的,继续选no

第三次,aptitude给出了满意的方案,只有一个未安装的,这时可以选yes了

5.添加环境变量
6.安装构建依赖
7.初始化和更新
7.1 初始化
由于境外资源被屏蔽,这样初始化几乎百分百会失败

7.1.1 目前可行的解决办法:重新定位资源
修改/usr/lib/python3/dist-packages/rosdistro/__init__.py的第68行
修改/usr/lib/python3/dist-packages/rosdep2/sources_list.py的第64行
修改/usr/lib/python3/dist-packages/rosdep2/rep3的第36行
修改方式:把
raw.githubusercontent.com/ros/rosdistro/master替换成gitee.com/zhao-xuzuo/rosdistro/raw/master,如下图


7.1.2 结果
如果出现以下结果,则成功

7.2 更新
结果

 支付宝微信扫一扫,打赏作者吧~
支付宝微信扫一扫,打赏作者吧~